Jirgin sama

Maritime

Motar Kasa

Mai da Gas

Ma'adinai
UAV
Taswira

Fasahar Masana'antu
Kayayyakin mu

M202 MEMS Biaxis Gyro
M202 MEMS biaxis gyro yana ɗaukar babban madaidaicin gyroscope, kuma yana ɗaukar babban aikin ramuwa na zafin jiki da algorithm daidaita na'urar inertial.
IMU-M11 IMU Ma'aunin Auna Inertial
IMU yana da fa'idodi na ƙananan girman, ƙarancin amfani da wutar lantarki, babban nauyi da babban abin dogaro. Shortan lokacin farawa, babban madaidaici, ana amfani da shi a cikin tsarin kewayawa inertial hadedde MEMS, tsarin tunani na MEMS da sauransu.


INS-M05 Inertial Inertial Inertial Inertial Navigation System
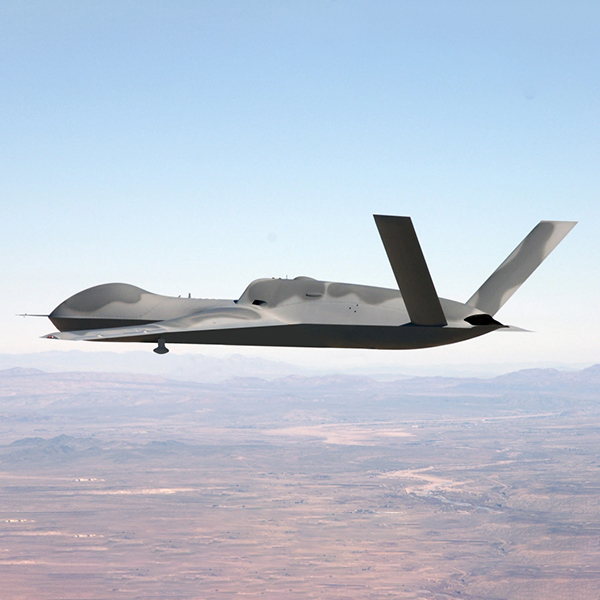
INS-M05 wani ƙaramin ƙaramin madauri ne mai haɗaɗɗen kewayawa (INS), wanda ya dace da jirgin sama, motoci, robots, motocin saman ƙasa, motocin ƙarƙashin ruwa da sauran masu dako. Yana iya auna hali, kan gaba, saurin gudu da bayanin matsayi. Ana amfani da tsarin kewayawa tauraron dan adam GNSS don haɗaɗɗen kewayawa, wanda ke da babban ƙarfin hana tsangwama.
Module Canjin IFC-GB10M I/F
Yana da babban madaidaicin da'irar juyawa na yanzu/mita tare da haɗin caji. Da'irar jujjuyawa na iya ci gaba da jujjuya fitowar sigina na yanzu ta ma'aunin accelerometer uku a lokaci guda. Na'urorin accelerometer guda uku suna aiki da kansu ba tare da shafar juna ba.